
A Flight controller is defined as the brain of the aircraft. It includes a circuit board with a wide range of sensors that detect the movement of the drone, and user commands. As a result, controls the speed of the motors, and makes the craft move as per the data instructed. This blog discusses about the SP racing F3 flight controller setup in the cleanflight, step-by-step. We will cover everything from installing the cleanflight GUI software to setting up flight modes for your quadcopter.
What is the SP Racing F3 Flight controller?
The Seriously Pro Racing F3 Flight Controller (SPRacingF3) was created to provide awesome flight performance based on tried and tested sensors, as well as unparalleled I/O capabilities in a small and extremely lightweight form factor using a next-generation CPU in a small and extremely lightweight form factor. Whether you’re interested in FPV racing, acrobatic flying, or aerial photography, the SP Racing F3 has all the capabilities you need for the heart of your aircraft.
SP Racing F3 Versions:
There are two versions are available in the SP Racing flight controller.
- SP Racing Acro version
- SP Racing Deluxe version.
Both the versions use the same basic hardware such as the STM32F303 CPU model.
| Parameters | SP Racing F3 Acro version | SP Racing F3 Deluxe version |
| CPU model | STM32F303 | STM32F303 |
| Main MPU | MPU6050 | MPU6050 |
| Barometer | No | MS5611 |
| Compass | NO | HMC5883 |
| PWM outputs | 8 | 8 |
| No. of UARTs | 3 | 3 |
| RSSI analog input | Yes | Yes |
| I2C input | Yes | Yes |
| Buzzer output | Yes | Yes |
| VBAT input | Yes-up to 4S (17v) | Yes- up to 4S (17v) |
| LED strip output | Yes | Yes |
| Current sensor analog input, | Yes | Yes |
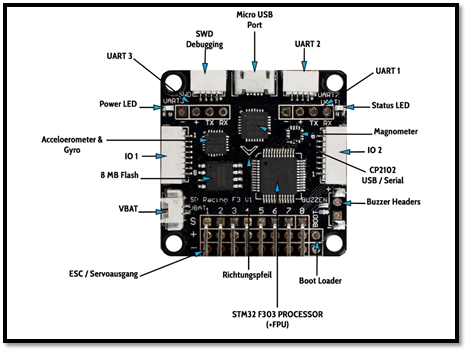
SP Racing F3 pinouts
The below figure shows the pinout diagram of the SP racing F3 flight controller. It includes an accelerometer, gyro sensor, magnetometer, etc.
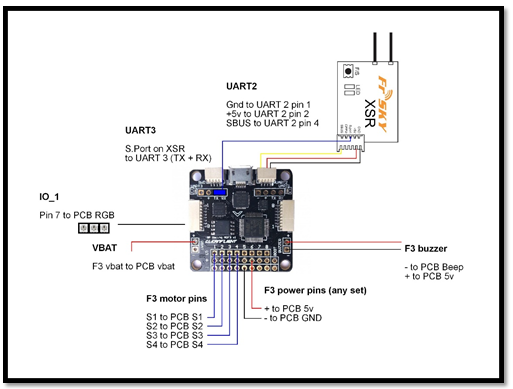
SP Racing connection diagram:
Below is the connection diagram of the Sp racing f3 flight controller.
SP Racing Firmware
The SP Racing boards can run either base flight or clean flight firmware. Both are very similar but clean flight Firmware is more updated. Kindly go through the below link and install this software.
Link: https://chrome.google.com/webstore/search/cleanflight?hl=en
Connect your flight controller to the PC and pick the com port after the software has been installed. Then, at the bottom of the screen, select the newest firmware and click the Load Firmware (Online) button, and Clean flight will download the firmware to your PC. After that, you’ll notice the ‘Flash Firmware’ button. Following that, we must first enable the bootloader mode.
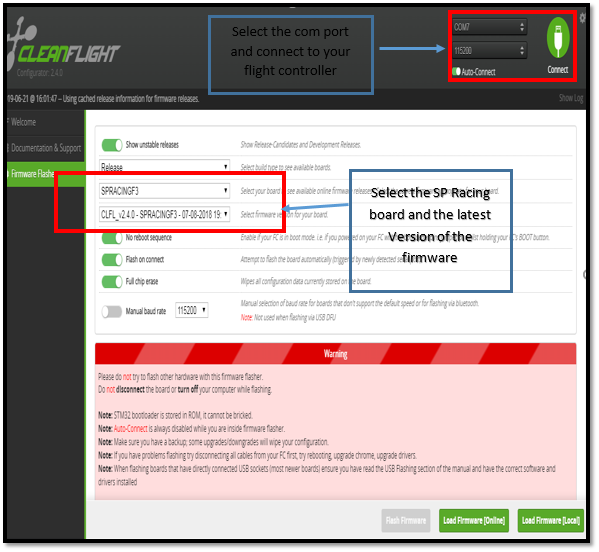
In bootloader mode, firmware can be flashed onto the flight controller board. Enabling bootloader mode is a straightforward procedure. When connecting the flight controller to your PC, short the two bootloader pins (as indicated below).

Simply click the Flash Firmware button now that the board is linked to the PC in bootloader mode.If it works right immediately, that’s fantastic!
This isn’t always the case, though. Changing a few parameters is frequently required. This is the method I use:
- Return to the previous page and enable ‘Flash on Connect’ (choose ‘No reboot sequence’ first) as well as ‘Full Chip Erase’ for good measure.
- Reconnect the board after unplugging it (still in bootloader mode). When Clean Flight detects a connection, it will attempt to automatically flash the firmware.
- Didn’t work again? Hit ‘Flash Firmware’ again just to make sure.
- Finally, after you’ve gone through all of this, disconnect the board and choose ‘Manual Baud Rate’ (whilst keeping the other options selected). You might also want to experiment with a lower baud rate just to be sure.
- Re-plug the board, and there you have it! The firmware, hopefully, is being flashed.
- If you’re still experiencing issues, record yourself performing what you’re doing and post it on our forums, and one of us will assist you!
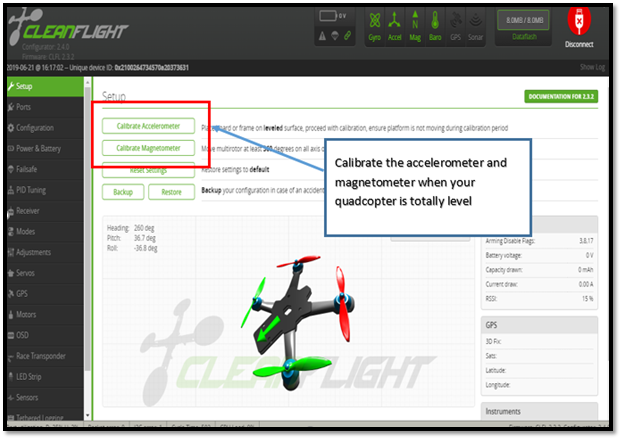
Calibration of Accelerometer and Compass:
As a result, the sensitive IMU devices may need to be re-calibrated. Fortunately, this is a simple matter of clicking a button within cleanflight. Simply connect to your board using cleanflight and click the Calibrate Accelerometer button on the Setup Tab.
Simply position your quadcopter on a level surface (thereby ensuring the flight controller is level) and make sure there are no vibrations or micro-movements before pushing this button. Then, under the Setup Tab, hit the calibrate Accelerometer button.
Setting up your Radio:

Make sure the radio settings are accurate when you’re setting up your clean flight board. This involves double-checking that the channels are assigned correctly and aren’t reversed. Also, the range should be between 1000 and 2000.

The inputs from your radio are represented by a collection of bars on the tab above. The appropriate bar on the screen should move when you move a stick on the radio.
When you move a stick on the radio, you can notice that a station that doesn’t match to that stick appears on the screen. You’ll need to fix this, which you may accomplish by adjusting the channel mapping.
Conclusion:Hope this blog helps you to understand the basics of SP racing F3 flight controller setup. We, MATHA ELECTRONICS will come back with more informative blogs.