
Electric motors are used in almost every industry and in a wide range of applications. Electric motors are available in a wide range of sizes and types. These motors can be selected based on their functioning, voltage, and applications. Using the proper motor with high-quality parts and performing regular maintenance keeps your motor running smoothly and protects endpoint equipment from wear and power spikes.

Stepper Motor rotates in steps in a controlled manner and most importantly, this precise motion of the shaft is achieved without using any feedback system. This article will teach you the fundamentals of Stepper motors, as well as different types of motors in detail.
WHAT IS A STEPPER MOTOR?
A stepper motor is an electromechanical device that converts electrical power into mechanical power. It’s also a brushless, synchronous electric motor with the ability to divide a full rotation into a significant number of stages. As long as the motor is properly sized for the application, the position of the motor can be precisely regulated without the use of any feedback device.

The step movement becomes continuous rotation as the frequency of the digital pulses increases, with the speed of rotation being directly proportional to the frequency of the pulses. Because of its low cost, great reliability, high torque at low speeds, and a simple, sturdy architecture that can function in practically any environment, step motors are utilised every day in both industrial and commercial applications.
CONSTRUCTION & WORKING PRINCIPLE
The Construction of a stepper motor is similar to a DC motor. It has a permanent magnet in the middle, called a Rotor, that turns when force is applied to it. This rotor is encased by a number of stators, each of which is coiled with a magnetic coil. The stator is placed close to the rotor to allow magnetic fields within the stators to govern the rotor’s movement.

The stepper motor can be controlled by individually activating each stator. As a result, the stator magnetizes and functions as an electromagnetic pole, repelling energy from the rotor to move it forward. The stator’s alternate magnetizing and demagnetizing will gradually move the rotor, allowing it to turn with high precision.
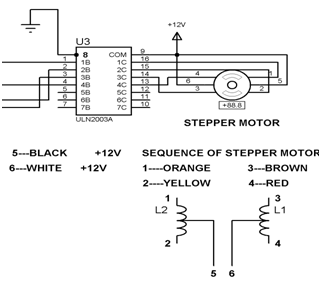
STEPPER MOTOR CIRCUIT:
DIFFERENT DRIVING TECHNIQUES:
Stepper motor driving techniques can be possible with some special circuits due to their complex design. There are numerous ways to drive this motor, some of which are detailed below using a four-phase stepper motor as an example..
- Single Excitation Mode
A single excitation mode is the most basic method of operating a stepper motor. It is an old strategy that is rarely used nowadays, but it is important to be aware of it. Every phase of the adjacent stator will be triggered one by one alternately with a particular circuit in this manner. To move the rotor ahead, magnetize and demagnetize the stator.
- Full Step Drive
In this method, two stators are activated at the same time instead of one in a short period of time. This technique produces a lot of torque and allows the engine to drive a lot of weight.
- Half Step Drive
This technique is similar to the Full step drive because the two stators will be arranged next to each other so that the first one will be activated first, followed by the third one. This cycle switches two stators first, then the motor is driven by the third stator. The stepper motor’s resolution will be improved while the torque is reduced using this strategy.
- Micro Stepping
Because of its precision, this approach is the most commonly utilised. The stepper motor driver circuit will give variable step current in the form of a sinusoidal waveform to the stator coils. This little step current can improve the accuracy of each step. This approach is widely utilized because it gives great accuracy while also significantly reducing operating noise.

TYPES OF STEPPER MOTOR:

There are three main types of stepper motors, they are:
- Permanent magnet stepper
- Hybrid synchronous stepper
- Variable reluctance stepper
- Permanent Magnet Stepper Motor
Permanent magnet motors have a permanent magnet (PM) in the rotor that attracts or repels the stator electromagnets.

When compared to the other varieties of stepper motors available on the market, this is the most popular type. Permanent magnets are used in the manufacture of this motor. The tin-can/can-stack motor is another name for this type of engine. The key advantage of this stepper motor is that it has a lower production cost. It has 48-24 steps for each revolution.
- Variable Reluctance Stepper Motor
Variable reluctance (VR) motors comprises of a plain iron rotor and operate based on the principle that minimum reluctance occurs with minimum gap, hence the rotor points are attracted toward the stator magnet poles.

The variable reluctance stepper motor is the common type of motor used for the past many years. As the name indicates, the rotor’s angular position mainly depends on the magnetic circuit’s reluctance that can be formed among the teeth of the stator as well as a rotor.
- Hybrid Synchronous Stepper Motor
Hybrid stepper motors get their name from the fact that they combine permanent magnet (PM) and variable reluctance (VR) technologies to produce maximum power in a small package.

The hybrid stepper motor is the most popular type of motor because it performs well when compared to a permanent magnet rotor in terms of speed, step resolution, and holding torque. However, as compared to permanent magnet stepper motors, this type of stepper motor is more expensive. The features of both permanent magnet and variable reluctance stepper motors are combined in this motor. These motors are utilised in applications that demand a low stepping angle, such as 1.5, 1.8, and 2.5 degrees.
HOW TO SELECT A STEPPER MOTOR?
Before selecting a stepper motor for your requirement, it is very significant to examine the torque-speed curve of the motor. This information is accessible from the motor’s designer, and it is a graphical indication representing the motor’s torque at a given speed. The torque-speed curve of the motor should closely match the requirements of the application; otherwise, the intended system performance will not be achieved.
PARAMETERS OF STEPPER MOTOR
The stepper motor parameters mainly include step angle, steps for each revolution, steps for each second, and RPM.
- Step Angle
The step angle of the stepper motor can be defined as the angle at which the motor’s rotor turns once a single pulse is given to the stator’s input. The number of steps in the motor and the number of revolutions in the rotor can be used to describe the motor’s resolution.
- Resolution = Number of Steps/Number of Revolution of the Rotor
The step-angle, which is given in degrees, can be used to determine the motor’s arrangement. The number of steps made throughout a single round of the rotor is the resolution of a motor (the step number). When the motor’s step-angle is minimal, the resolution for this motor’s arrangement is high.
The precision with which this motor arranges items is largely determined by the resolution. When the resolution is high, the accuracy suffers.
- Steps for Each Revolution
The steps for each resolution can be defined as the number of step angles necessary for a total revolution. The formula for this is 360°/Step Angle.
- Steps for Each Second
This type of parameter is mostly used to count the number of steps taken each second.
- Revolution per Minute
RPM stands for revolutions per minute. It is used to calculate the revolution frequency. We may compute the number of revolutions in a minute by using this parameter. The letter m
Steps for Each Second = Revolution per Minute x Steps per Revolution / 60
ADVANTAGES:
The advantages of stepper motor include the following.
- Ruggedness
- Simple construction
- Can work in an open-loop control system
- Maintenance is low
- It works in any situation
- Reliability is high
- Wide range of rotational speeds
- The rotation angle of the motor is proportional to the input pulse.
- The motor has full torque at standstill.
- Precise positioning and repeatability of movement since good stepper motors have an accuracy of 3 – 5% of a step and this error is noncumulative from one step to the next.
- Excellent response to starting, stopping, and reversing.
- The motor’s response to digital input pulses provides open-loop control, making the motor simpler and less costly to control.
DISADVANTAGES
The disadvantages of stepper motor include the following.
- Efficiency is low
- The Torque of a motor will declines fast with speed
- Accuracy is low
- Feedback is not used for specifying potential missed steps
- Small Torque toward Inertia Ratio
- Extremely Noisy
- If the motor is not controlled properly then resonances can occur
- Operation of this motor is not easy at very high speeds.
- The dedicated control circuit is necessary
- As compared with DC motors, it uses more current
APPLICATIONS
- Industrial Machines – Stepper motors are used in automotive gauges and machine tooling automated production equipment.
- Security – new surveillance products for the security industry.
- Medical – Stepper motors are used inside medical scanners, samplers, and also found inside digital dental photography, fluid pumps, respirators, and blood analysis machinery.
- Consumer Electronics – Stepper motors in cameras for automatic digital camera focus and zoom functions.
- Business machines applications, computer peripherals applications.
CONCLUSION
Hope all of you get an idea about the stepper motor like construction, working principle,, advantages, disadvantages, and its applications. Now you have got an idea about the types of stepper motors and their applications.