
What are Oneshot and Multishot in ESC? / Oneshot Vs Multishot ESC / ESC calibration Protocol
In this blog, we discuss the various ESC Calibration protocols like Oneshot, Multishot, and DShot.

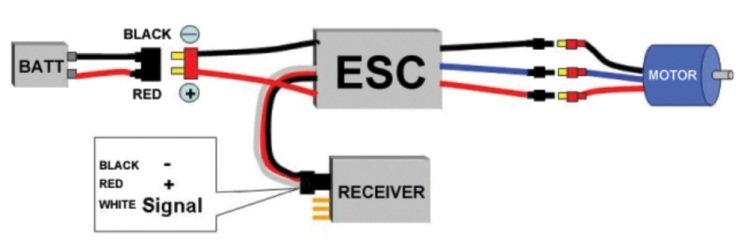
What is ESC?
The ESC (Electronic speed controller) is an electronic circuit that controls and regulates the speed of the BLDC (Brushless DC) motor; it provides reversing and breaking of the motor. Basically, it is the speed controller for a BLDC motor. for more ESC’s click here
Brief information about Firmware:
The software that runs on every ESC that determines the ESC’s performance is known as ESC firmware. This provides details on which protocols are supported as well as the configuration interface that may be used. The firmware that can be used by an ESC is limited by the hardware. Firmware comes in a variety of forms, including:
- BLHeli ESC.
- BLHeli_S ESC.
- SimonK ESC.
- Kiss.
- BLHeli_32.
- Other manufacturers’ own software.
Brief information about protocol:
One of the most essential duties of the ESC calibration technique is to tell how quickly the motor should spin.
What exactly are Oneshot, Multishot, and other terms?
The ESC calibration protocols are Oneshot, Multishot, and Dshot. This protocol allows us to connect Electronic speed controllers (ESC) to flight controllers or radio receivers, i.e., it tells us how to regulate the speed of a BLDC motor and what duty cycle it has for each protocol. This protocol enables transmitters (remote controllers) to communicate with the ESC.
There are different types of protocol, have a look
- Analog PWM.
- Standard PWM.
- Oneshot125
- Oneshot42
- Multishot
- Dshot (Digital shot).
- Proshot.
- Analog PWM:
0 percent duty cycle represents STOP, whereas 100% duty cycle equals FULL POWER.
- Standard PWM:
If pulse length is 1ms then STOP and when pulse length is 2ms then FULL POWER. Therefore the maximum frequency is 500Hz. In this protocol, if the signal delay is 2ms then the flight controller will start delaying the signal to ESC by 2ms.
- Oneshot125:
The pulse length in this protocol is 8 times shorter than regular PWM. . If the pulse length is 125µs indicates STOP and if the pulse length is 250µs then FULL POWER. The maximum frequency is 4 kHz. This protocol must be supported by both the flight controller and the ESC for successful calibration and operation.
- Oneshot42:
With a maximum frequency of 12 kHz and a signal latency of 42s, this Oneshot ESC is 3 times quicker than Oneshot125.
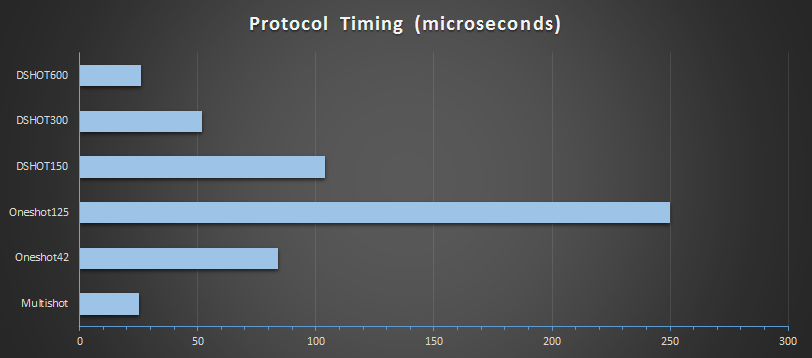
- Multishot:
With a maximum frequency of 32 kHz, this is the quickest ESC protocol among the others. It is 10 times faster than Oneshot125. . Because of the scarcity of Multishot ESCs, this technique isn’t extensively used.
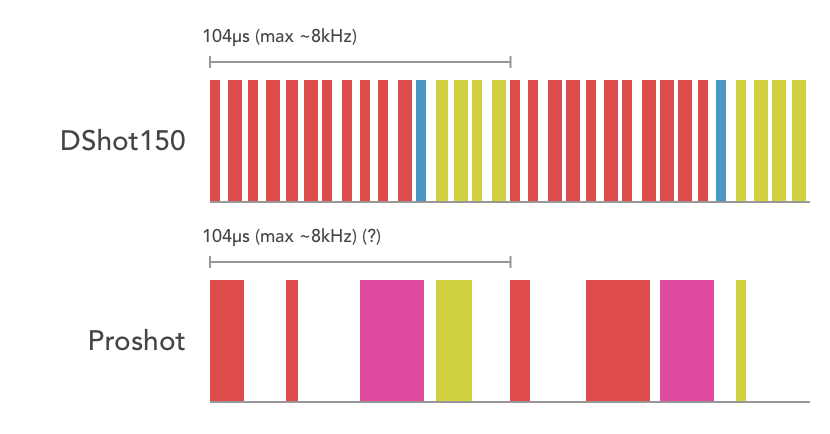
- Dshot ESC (Digital shot):

Standard PWM, Oneshot125, Oneshot42, and Multishot are all analog signals. To determine the value being communicated, they all rely on the length of the electrical pulse.
Since this Dshot is a digital signal, it’s wonderful to know that ESC calibration will no longer be necessary. Because the digital signal is made up of one’s and zero’s, it will be far more robust to electrical noise.
All FPV Drone racing kits include FPV, ESC, BLDC motor, and radio transmitter.
There are three different Dshot protocol types:
- DShot1200 ESC – 1200Kbits/Sec.
- DShot600 ESC – 600Kbits/Sec.
- DShot300 ESC – 300Kbits/Sec.
- DShot150 ESC – 150Kbits/Sec.
Advantages of Dshot:
- Very high protocol frame frames are supported.
- No need to do any ESC throttle range calibration.
- Clock differences between the ESC and flight controller don’t affect flight.
- All values sent to the ESC are protected with a 4 bit CRC.
- Proshot:
The Proshot is a hybridization of digital(Dshot) and analog(Oneshot/ Multishot) ESC protocols; which aims to achieve robustness like digital protocol and flexibility in hardware like analog protocols.
Conclusion:
I hope all of you are clear about the various ESC Calibration protocols like Oneshot, Multishot, and DShot. We MATHA ELECTRONICS, will be back soon with more interesting topics.