
Different Types of Electric Motor- A Complete Guide
Electric motors are used in almost every industry and in a wide range of applications. Electric motors are available in a wide range of sizes and types. These motors can be selected based on their functioning, voltage, and applications. Using the proper motor with high-quality parts and performing regular maintenance keeps your motor running smoothly and protects endpoint equipment from wear and power spikes.
This article will teach you the fundamentals of electric motors, as well as different types of motors in detail.
WHAT IS AN ELECTRIC MOTOR?
Electric motor is a machine which converts electric energy into mechanical energy usually by employing electromagnetic phenomena. . It works on the principle that when a current-carrying conductor is placed in a magnetic field, it experiences a mechanical force whose magnitude is determined by F = BIl Newton and whose direction is determined by Fleming’s Left-hand Rule.
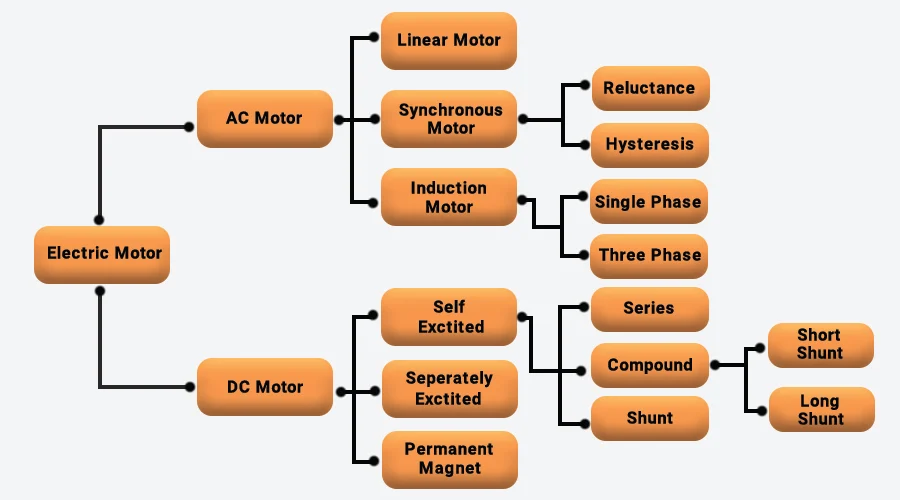
The various types of electric motor differ in the ways in which the conductors and the field are arranged and also in the control that can be exercised over mechanical output torque, speed, and position. The following are the two main types of electric motors:
- AC motors, which are powered by alternating current
- DC motors, which are powered by direct current
Electric motors are available in a wide range of sizes and types. These motors can be selected based on their functioning, voltage, and applications.
HOW ELECTRIC MOTOR WORKS?
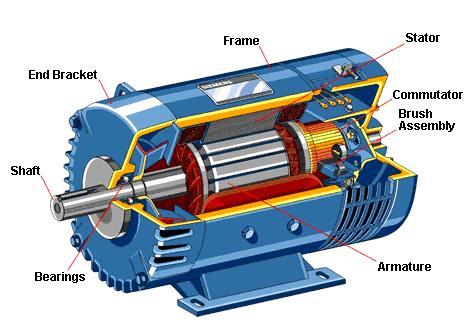
An electric motor is a device used to convert electricity into mechanical energy which is opposite to an electric generator. The field winding and the armature winding are two key components of every motor. The field winding’s primary role is to generate a fixed magnetic field, whereas the armature winding resembles a conductor organized within the magnetic field. They work on the basis of electromagnetism, which states that when an electric current is present in a magnetic field, a force is applied. This force produces a torque on the armature winding in the magnetic field, which causes the armature on the rotor or stator to rotate around the shaft.
AC MOTOR:
An alternating current is required for the AC motor to rotate. Using electromagnetic induction, this motor transforms alternating current to mechanical power. Magnetic fields generated by coils wrapped around the output shaft provide energy to an AC motor. AC motors are efficient, long-lasting, quiet, and adaptable, making them a suitable option for a variety of power generation applications.
The stator, or fixed outer drum, and the rotor, or revolving inner section coupled to the motor shaft, are the two primary components of an AC motor. Rotating magnetic fields are generated by the stator and rotor The winding of the stator that creates the rotating field is created by alternating current.
When an AC supply flux is connected to the stator, an air gap is generated, which rotates the flux at a fixed synchronous speed, producing voltages in the stator and rotor winding.
DC Motor:
In DC Motors,Direct current electric energy is converted into mechanical rotational energy. You can also utilize the device in reverse to generate DC electrical power by turning a motor shaft (making the device function as a generator). The winding connections, in which how the two coils in the motor are coupled to each other, can be used to classify DC motors.A magnetic field is formed in the stator of a DC motor when it is turned on. The field causes the rotor to rotate by attracting and repelling magnets on the rotor. The commutator, which is hooked to brushes connected to the power source, supplies current to the motor’s wire windings to keep the rotor revolving.
TYPES OF MOTOR:
Electric motors are available in three main segments like AC motor, DC motor, & special purpose motors.
TYPES OF AC MOTOR:
AC motors are mainly classified into three types and they are,
- Synchronous Motor
- Asynchronous or Induction Motor
- Linear Motor

- Synchronous Motor
The synchronous motor functions similarly to an AC motor, except that the total number of shaft revolutions is equal to an integer multiple of the applied current’s frequency.
The motor speed is synchronised with the AC frequency in this motor. The three-phase supply is essential for these motors. The motor speed is the continuous speed at which an electromotive force is generated by the motor.

There is no air gap available in the speed of the stator current and rotor. As a result, it improves rotation precision. These motors can be used in automation, robotics, and other applications due to their great rotation accuracy.
The synchronous motor is classified into ntwo:
(i) Reluctance Motor
The reluctance motor has a comparable structure to an induction motor and operates like a single-phase synchronous motor. The rotor in this motor is shaped like a squirrel cage, and the stator has auxiliary and main windings. The auxiliary windings are particularly beneficial for providing a level operating at a constant speed.

Signal generators, recorders, and other devices that require synchronisation frequently use these motors.
(ii) Hysteresis Motor
A Hysteresis Motor is a synchronous motor with a uniform air gap and without DC excitation. It operates both in single and three-phase supply.A hysteresis motor has a core of non-magnetic material with a layer of special magnetic material. The rotor is a smooth cylinder without any windings. The hysteresis ring is made of chrome or steel with a hysteresis loop.

The unique nature of the rotor of a hysteresis motor is what makes it different from other AC motors. The rotor contains semi-permanent magnetic material. Torque is created by the magnetic flux lagging behind the external magnetizing force. The eddy current induced in the rotor is by the action of the rotating flux of the stator windings.. Hysteresis motors provide exact speed with low flutter and operate with little noise.
- Induction Motor
An induction motor or an asynchronous motor runs with asynchronous speed. It uses electromagnetic induction for transforming electric energy into mechanical power.Induction motor mainly uses electromagnetic induction for changing the energy from electric to mechanical. Based on the rotor construction, these motors are classified into two types namely squirrel cage & phase wound.

(i) Squirrel Cage Rotor
A squirrel-cage rotor is the rotating part of the common squirrel-cage induction motor. The motor’s rotor is shaped like a squirrel cage. The inner component, which resembles a cage, is attached to the output shaft. This rotor reduces the rotor’s magnetic locking and humming sound.

(ii) Phase Wound Rotor
This rotor is a variant of the three-phase induction motor, which is designed to deliver strong torque for loads with high inertia while consuming relatively little current. Slip ring motors are another name for it.

On the basis of supply phases, the induction motor is classified into single-phase and three-phase induction motor.
(i) Single-phase induction motor
A single-phase induction motor is a motor that uses electromagnetic induction to convert single-phase AC electric energy into mechanical power. Single phase induction motors are built similarly to three phase motors: an ac winding is installed on the stator, and short-circuited conductors are installed in a cylindrical rotor.
(ii) Three-phase Induction Motor
A three-phase induction motor is an electromechanical energy converter that converts three-phase input electrical power into mechanical output power. A stator and rotor make up a three-phase induction motor. The stator has a three-phase stator winding, whereas the rotor has a rotor winding that is short-circuited. The stator winding is powered by a three-phase power supply. The name comes from the fact that the rotor winding receives its voltage and power from the stator winding via electromagnetic induction.

- Linear Motor
A linear motor is an electric motor with stator and rotor that have been unrolled. Instead of a circular torque, it provides a linear force along its length (force). Linear motors are commonly found in sliding doors and actuators.
TYPES OF DC MOTOR:
The different types of DC Motor are:
- Separately Excited DC Motor
- Permanent Magnet DC Motor
- Self-Excited DC Motor
- Separately Excited Motor
As the name presents, in the case of a separately excited DC motor, the main supply is given separately to the armature and field windings.The main difference between these types of DC motors is that the armature current does not pass through the field windings since the field windings are driven by a separate DC supply.So that the motor can be controlled from the shunt and the armatures winding can be strengthened to generate flux.

- Permanent Magnet DC Motor
Permanent Magnet DC (PMDC) Motors are DC motors with permanent magnet poles. The field flux is created by a permanent magnet in the motor. The magnets are positioned on the inner circumference of the cylindrical steel stator and are radially magnetised. The magnetic flux is returned through the stator of the motor. The rotor has a DC armature with brushes and commutator segments.

The PMDC motor provides more starting torque and has very good speed regulation. But it has a limitation of torque so they are typically found on low horsepower applications such as automobile starters, wipers, air conditioners, etc.
- Self-Excited DC Motor
Self-excited DC motors are those in which the field winding is connected in series or parallel to the armature winding. The self-excited DC motor is categorised as follows:
(i) Series Wound DC motor
In the series wound DC motor, the field winding connects in series with the armature of the motor.

(ii) Shunt Wound DC motor
The field winding of a shunt wound DC motor connects in parallel with the motor’s armature. The shunt-wound motor has excellent speed control. The field winding in this motor can be energised separately or coupled to the same source as the armature.

(iii) Compound Wound DC motor
The field winding of the compound wound rotor is connected in both parallel and series. Depending on the nature of compounding, there are two types of excitation for a compound wound DC motor.

- Cumulative compound DC motor- The shunt field flux produced by the shunt winding assists the main field flux produced by the series winding in a cumulative compound DC motor.
- Differential Compound DC Motor– In this case, the shunt field flux reduces the influence of the main series winding, hence the motor is called differential compound.
- Special Purpose Motors
The special purpose motors mainly include servo motor, stepper motor, Universalmotor, etc.

- Stepper Motor
As an alternative to stable rotation, the stepper motor can be employed to provide step angle revolution. We know that the entire revolution angle of any rotor is 180 degrees. In a stepper motor, however, the entire revolution angle can be divided into many stages, such as 10 degrees X 18 steps. This indicates that the rotor will go stepwise eighteen times in a whole revolution cycle, each time by 10 degrees. Stepper motors are used in plotters, circuit fabrication, process control tools, and standard movement generators, among other things.

- Brushless DC Motors
Brushless DC motors were founded with the aim of providing better performance in a smaller size than brushed DC motors. When compared to AC models, these motors are smaller. The lack of a commutator and a slip ring demands the use of a controller built in the electric motor.

- Universal Motor
This is a unique motor that requires a single AC supply rather than a DC source. Universal motors are series wound, which means that the field and armature windings are connected in series, resulting in strong starting torque. These motors are primarily intended for high-speed operation above 3500 rpm. They use a low-speed AC supply and a DC source of similar voltage.

- Servo Motor

A servomotor is a rotary or linear actuator that provides for precise control of angular or linear position, velocity, and acceleration. It is made of an appropriate motor and a position feedback sensor. The servo motors are available in both AC and DC.
CONCLUSION:
Here we concludes our discussion on electric motor types. The motor’s aim is to provide the optimum motion control whenever it is needed. The motor must be able to support the system’s use and overall function. I hope that this post has given you a better understanding of the many types of electric motors. These motors can be found in a variety of applications.