
HOW TO CHOOSE THE BEST MOTOR FOR YOUR QUADCOPTER?
We are living in a technology-based society where we have lots of innovative ideas day by day. These new innovations in electronics projects come as an ever-growing network that strives constantly to share and gather insight on the latest trends in the industrial Platform. Making a quadcopter is a popular hobby these days, and an increasing number of individuals are devoting their time to learning about its components and attempting to build one.

Quadcopters are becoming increasingly common as sensors and control systems become more advanced. This article will provide you with a complete study of choosing the best motor for your Quadcopter.
INTRODUCTION:
The first step in finding motors for your quadcopter would be to determine the entire weight of the copter. By taking into account all of the device’s components, an approximate weight estimate can be made. Many aspects of your quadcopter will be determined by the frame type, such as the prop size you may use and the engine size you can mount. The size of the motor you need is mostly determined by the size of your drone or quadcopter.
As a result, the first step in determining the best setup is determining the size of the drone you want to build, the prop size your chosen frame can run, and the batteries you want to utilize. The goal is to create a well-balanced, well-engineered system that fits your flying style, the drone’s function, and the size of the drone. Longer flight periods, longer equipment times, less wear and tear, and lower temperatures are all benefits of properly fitting your motor.
THRUST TO WEIGHT RATIO
In all types of multirotor, it is important to make sure that the motors used in your drone can produce around 50% more thrust than the actual weight of the drone. The drone will not quickly respond to your control and will not take off if the thrust of all motors remains less. Even in mildly windy conditions, your drone motors must stay steady and effective. A drone with a high thrust-to-weight ratio will have higher agility and acceleration, but it will also be more difficult to control.

Assume you have a quadcopter frame with a total component weight of about 800 grams. In this case, the quadcopter motor should be capable of producing a thrust of around 400 grams per quadcopter, for a total thrust of 1.6 kg. This is an excellent rule to remember while selecting a motor. Because, in order to be effective, a drone must be able to operate in the most adverse conditions.
The thrust-to-weight ratio of a racing drone is much higher than that of a standard multirotor. The ideal thrust-to-weight ratio for racing drones is 5:1.
If you want to take slow and steady aerial pictures with your drone, you should keep the thrust-to-weight ratio at 3:1 or 4:1.
EFFICIENCY OF THE MOTOR
It’s time to move on to the motor’s efficiency now that we’ve established the thrust-to-weight ratio. It is just the ratio of thrust produced to the power applied. As a result, a more efficient motor will consume less power to generate thrust.
Your motor’s efficiency determines how long it will fly. That means more the thrust produced by the motor as compared to the power utilized the smoother and longer will be your flight. Motor efficiency is critical for extending the flight time of your drone, thus it is an important consideration.
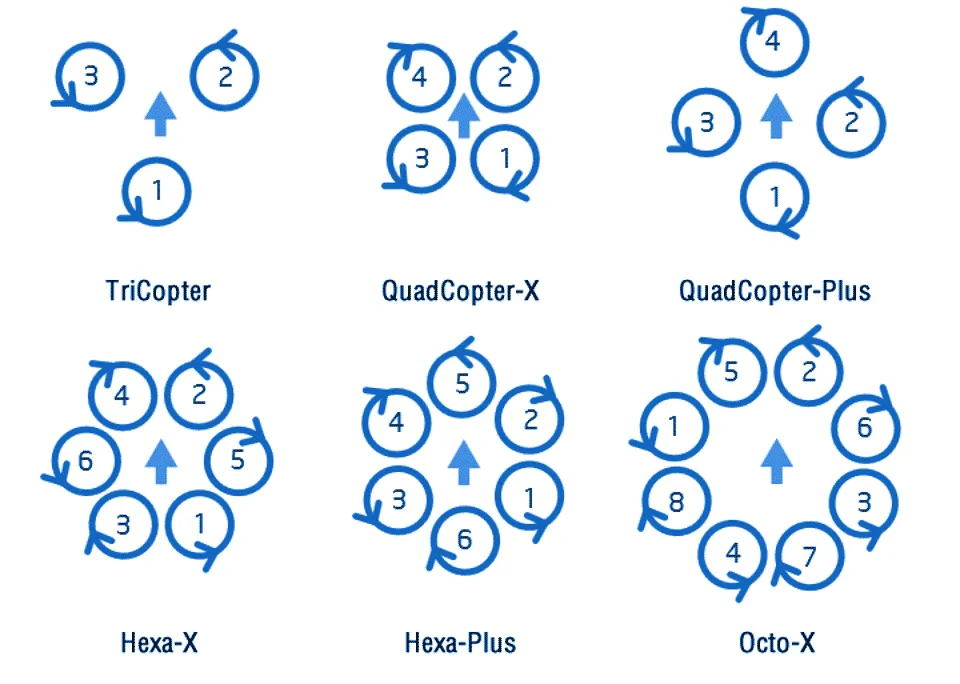
MOTOR MOVEMENTS
Drones, such as quadcopters, move by rotating two motors in a clockwise manner while rotating two others in an anti-clockwise way. This guarantees that the motors are more stable and the device is more effective.
POLE COUNT
The motor’s pole count comes next. The first is quadcopter motors with more poles. During the flight, these will require more voltage but create higher motor torque. However, as a result of these conditions, the motors’ RPMs are reduced. With these motor devices, it’s recommended to utilize larger blades.
On the other hand, use a motor with a lower pole count to get a higher RPM. However, these devices will necessitate smaller blades, which will have less torque and lift off the ground. Quadcopters are frequently seen using motors with greater pole counts in order to avoid the need for a gearbox.
N and P stand for poles and magnets, respectively. If you look up brushless motors, you’ll get specifications like 12N14P. The number before N indicates the number of electromagnets in the stator, while the number preceding P indicates the number of permanent magnets in the bell.

KV Ratings
Another important motor parameter is the KV rating. The KV rating refers to the motor’s rpm per volt.For example, if you choose the motor of 1000 KV and use 12V lipo battery for power, the total RPM becomes, 1000*12=12000

Due to air resistance, the RPM drops after mounting the propeller on the motor. The greater the KV, the faster the propeller spins, and the more current it can draw. As a result, larger propellers are typically utilized with low KV motors, but smaller and lighter propellers are preferable for high KV motors.
When we combine a larger propeller with a high KV motor, more torque is required to spin the propeller faster. It will use more current and generate too much heat while delivering the required torque. Overheating might potentially cause damage to your motor.
Motor Size
Brushless motors are usually classified by a four-digit number. The first two numbers of a motor’s name, for example, represent the stator’s diameter (in mm). The stator height is represented by the last two digits (in mm). The wider and taller the motor, the more torque it can create.
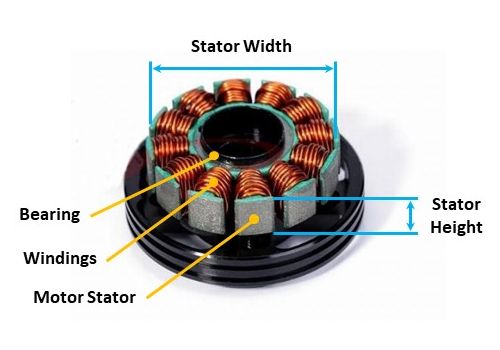
- Taller stator = more power at higher RPM
- Wider stator = more torque at lower RPM
The taller stator can cut through a larger magnetic field and help heat dissipation because it has a larger surface area. Wider stator motors contain a higher amount of iron and copper in the stator, resulting in a more torque and efficient motor.
The engine size and KV are limited by the frame size, while the propeller size is limited by the propeller dimension. The chart below provides some suggestions for motor size. The term “frame size” refers to the distance between the engine and the frame.

Voltage and Current Draw
The battery voltage has a significant impact on the motor. With a higher voltage, the drone motor spins faster and draws more current. You must determine how much thrust the motor generates and how much current it consumes. You can select the ESC based on the current draw of the motor and propeller combination.
CONCLUSION
Choosing the best motor for your drone is one of the most difficult tasks. There are a variety of factors to consider. One of the most crucial aspects of your drone is the motor, so make sure you get one that will help you get the maximum performance! We hope that this blog post has given you a better understanding of quadcopter motor parameters.